近日,中國科學院合肥物質院安光所高閩光研究員團隊在道路交通污染物多任務預測領域取得了重要進展。相關研究成果“基于DSTMA-BLSTM算法的道路污染物時間序列預測與敏感性分析”發表于環境建模與軟件領域國際權威期刊Environmental Modelling & Software。
城市道路交通排放是現代都市大氣復合污染的重要成分,其污染物濃度的時空演化受大氣氣象場擾動、交通行為模式及機動車排放結構多因素驅動。該過程具有顯著的非線性耦合與多尺度時變特征,使得傳統的線性統計模型在多源耦合情境下難以保持穩定的泛化性能。盡管近年來機器學習和深度神經網絡在空氣質量預測中取得一定進展,但其模型結構通常缺乏物理可解釋性,未充分考慮多污染物間的共變關系和異質動態特征,這成為限制其在復雜道路環境中應用的主要技術瓶頸。
針對上述問題,安光所研究團隊設計了一種融合雙向長短期記憶網絡(BLSTM)結構與動態共享-任務特異多頭注意力機制(DSTMA)的多任務深度學習模型,實現對多污染物時序特征的聯合建模與自適應分解。該模型在結構上通過共享注意力層提取不同污染物間的共性時序模式,同時利用任務特異注意力頭刻畫各污染物的獨立響應特征,從而實現對共享特征與差異性特征的自適應分離。基于真實道路監測數據進行的驗證結果表明,該算法在NO、NO2、CO2預測中分別實現了R2=0.959、0.944、0.949(R2的值越接近1,說明回歸直線對觀測值的擬合程度越好)的高精度表現,相比傳統LSTM模型平均誤差下降約30%,R2整體提升約0.06–0.12。該研究表明,DSTMA-BLSTM算法在交通排放監測、城市空氣質量預測及環境決策支持中具有廣闊應用前景。
論文的通訊作者為李相賢研究員,第一作者為秦玉勝博士后。本研究獲得了國家重點研發計劃(2023YFC3705403)等項目的資助支持。
論文鏈接:https://doi.org/10.1016/j.envsoft.2025.106730
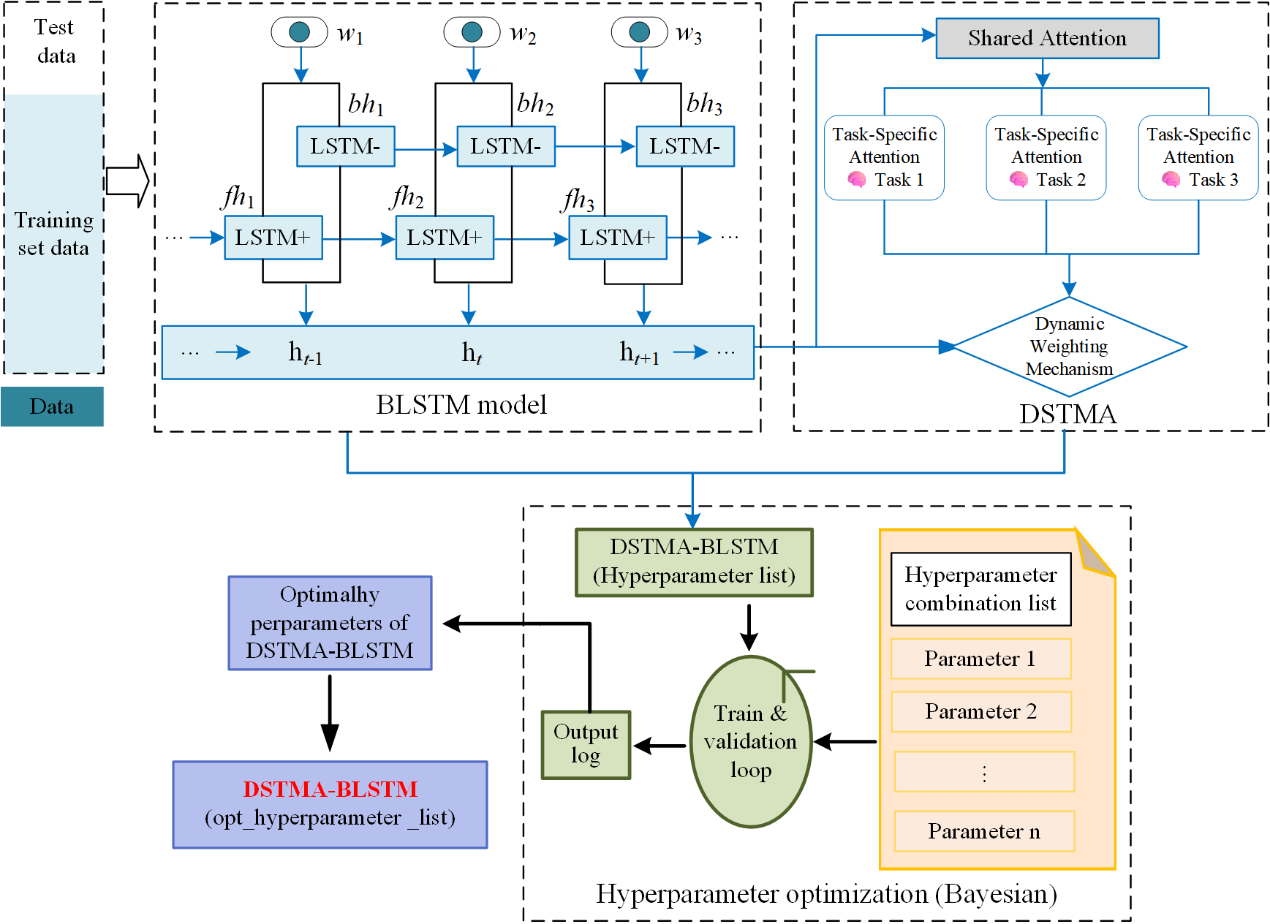
圖1. 基于DSTMA-BLSTM的污染物多任務預測算法
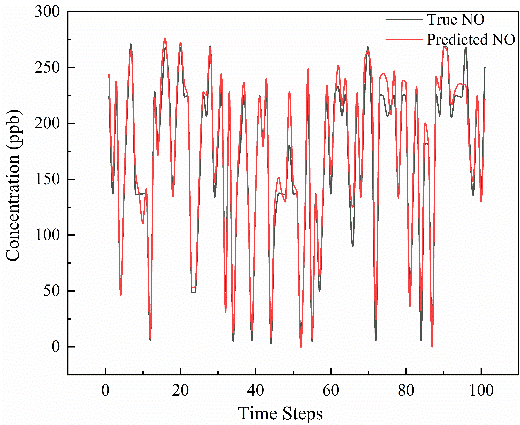

圖2. NOx聯合預測結果

<span id="9mlez"><optgroup id="9mlez"></optgroup></span>



