<span id="9mlez"><optgroup id="9mlez"></optgroup></span>
近日,中國科學院合肥物質院智能所祝輝、余彪團隊在地面無人車輛復雜地形機動性預測研究方面取得進展,三篇相關研究成果相繼發表在機器人與智能車輛領域頂刊IEEE Robotics and Automation Letters (IEEE RA-L)和IEEE Transactions on Vehicular Technology (IEEE TVT)上,并且被機器人頂會IEEE International Conference on Robotics and Automation (ICRA 2024)接收。
近年來,隨著地面無人車輛關鍵技術的不斷突破,地面無人車輛被廣泛應用于軍事、極地探索、深空探測等復雜非結構化環境以執行相關的任務。然而,由于沙地、灘涂、雪地、月壤等典型非結構化環境松軟地形存在低承載力與低附著力特性,極易造成裝備下陷與打滑,進而導致其機動行駛效率低下甚至無法通行。如何快速且高精度地預測地面無人車輛在復雜非結構化地形上機動能力,已經成為其任務執行成功與否的關鍵因素之一。
高保真度的模擬技術,如離散元方法,由于其模擬精度高優勢,被廣泛應用于模擬預測地面無人車輛復雜地形機動性。然而,基于離散元地形模型的整車遍歷仿真過程,尤其涉及求解大范圍地形上百萬級顆粒的迭代計算時,計算非常耗時。為了解決這一問題,團隊提出了一種雙重神經網絡增強的全局機動性預測模型。首先,通過開發一種自適應人工神經網絡代理模型 (ANN-RVE),實現了車輛-地形接觸力學仿真的加速。該模型基于多尺度代表性體積單元地形模型,通過預測應力和應變關系,有效替代了復雜的非線性迭代計算。其次,通過引入邊界數據增強的人工神經網絡模型,加速了全局機動性地圖的生成過程。該模型通過整車遍歷模擬小樣本高斯采樣的地形數據以及在機動性分類邊界處的額外增強地形數據,生成一個機動性訓練數據集。訓練過的人工神經網絡隨后被用于預測機動性地圖,從而避免了遍歷整個地形的耗時過程。相關實驗驗證了所提出的方法在確保了高預測精度的同時,顯著降低了計算耗時。
智能所博士生華琛為這三篇論文的第一作者,余彪研究員為系列論文的通訊作者。該工作部分得到了中國科學院青年創新促進會優秀會員人才基金和江淮先進技術中心夢想基金的支持。
論文鏈接:https://ieeexplore.ieee.org/document/10304248
論文鏈接:https://ieeexplore.ieee.org/document/10384839
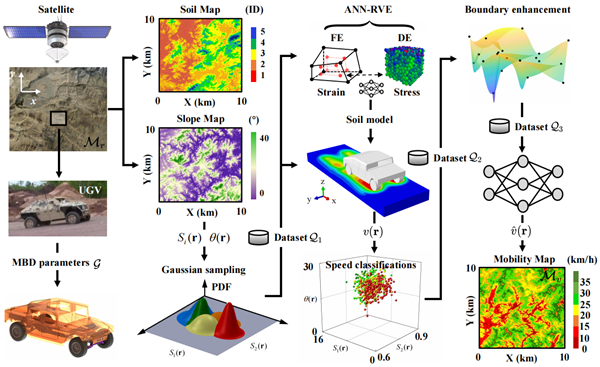
圖1 基于雙重神經網絡增強的全局機動性預測框架
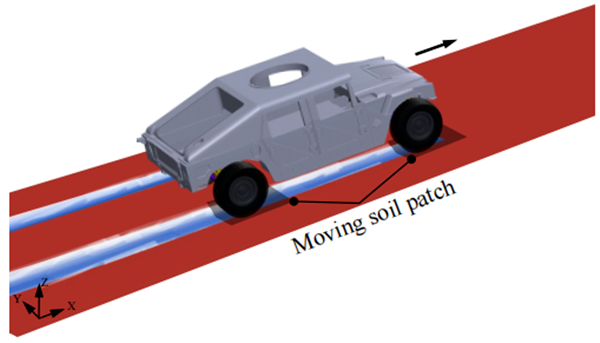
圖2 基于ANN-RVE地形模型的機動性仿真過程
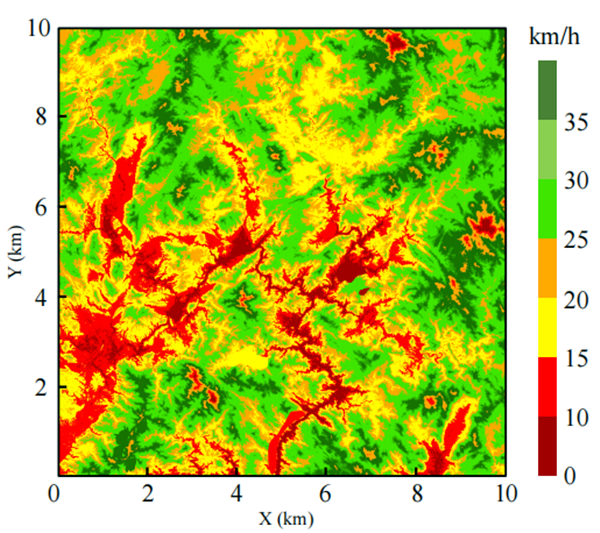
圖3 全局機動性預測地圖




